Senior Lecturer with the
Senior Lecturer with the

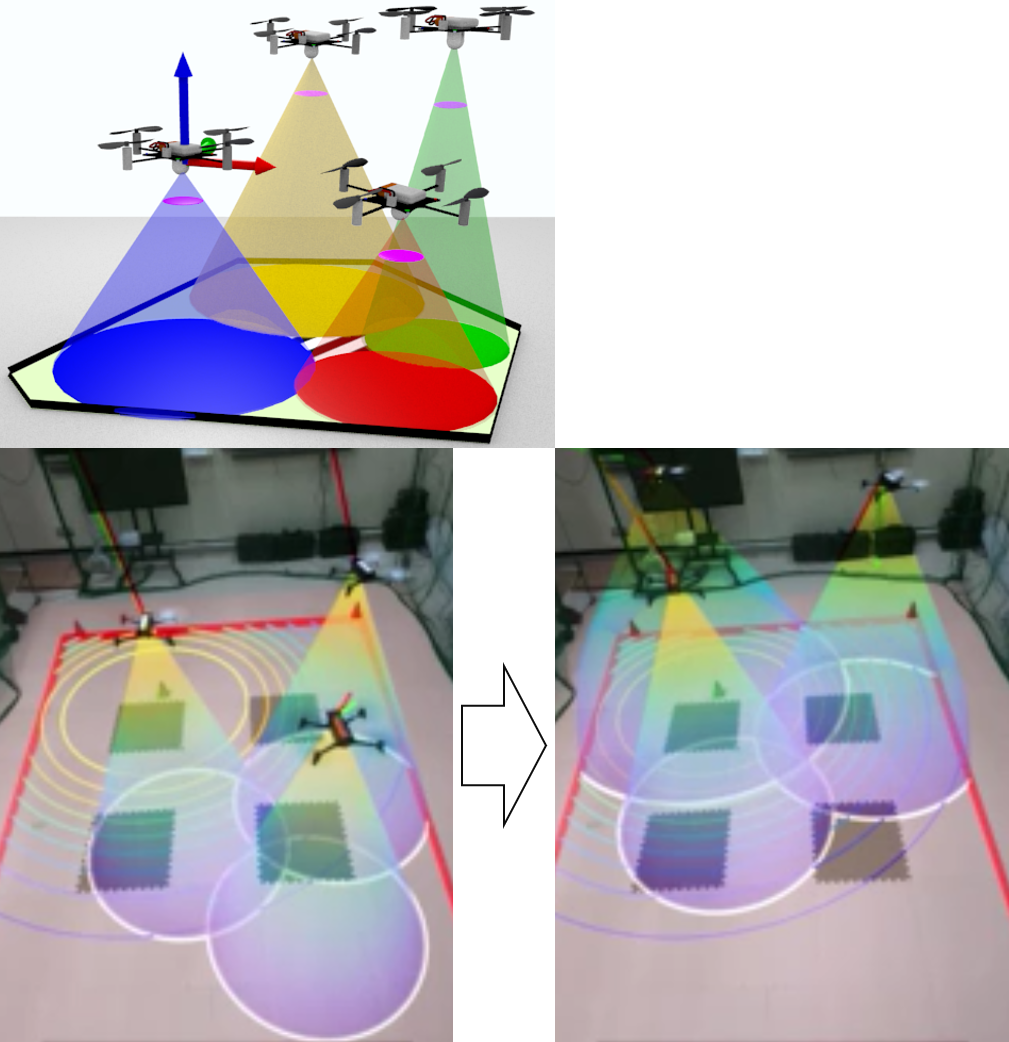
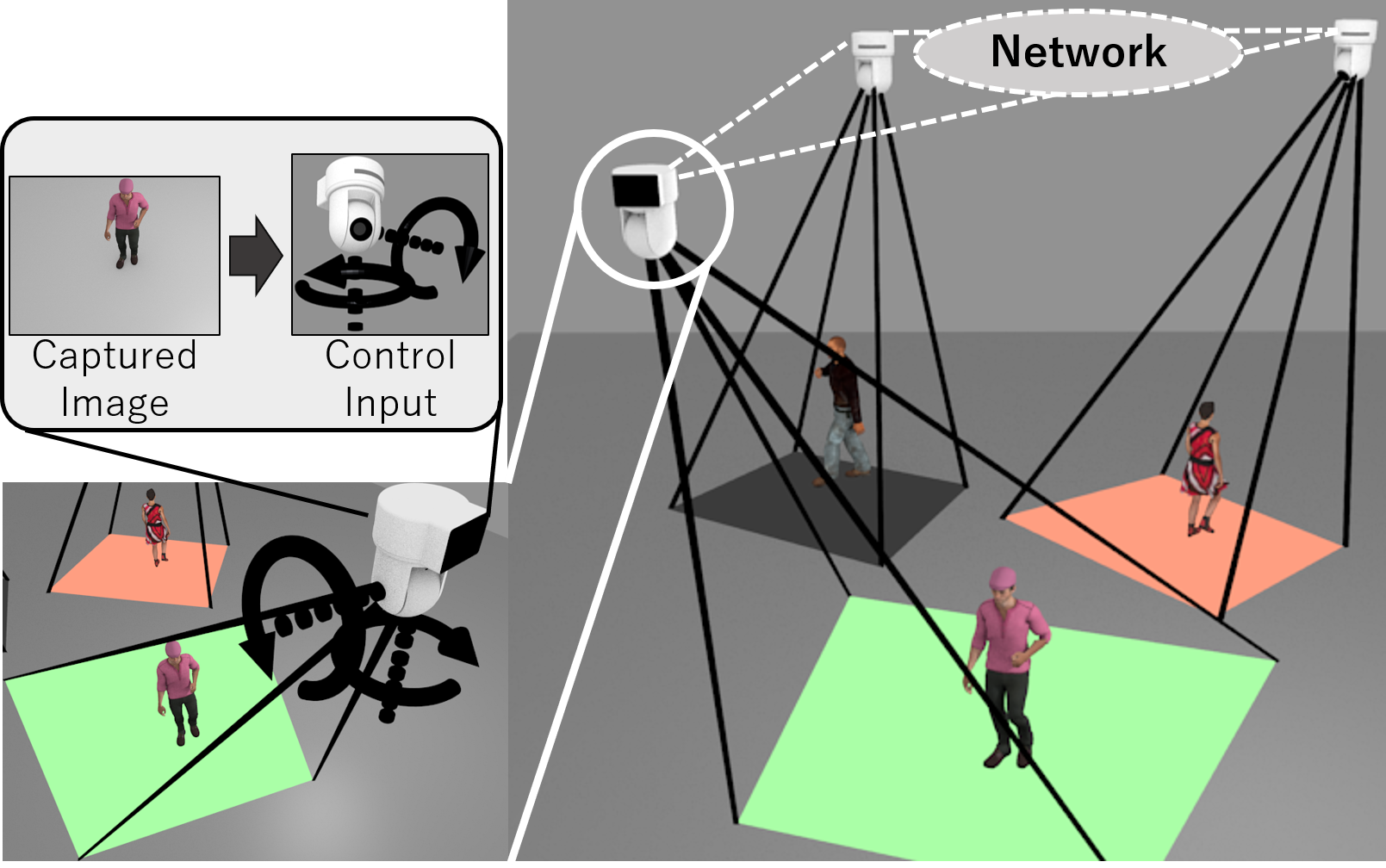
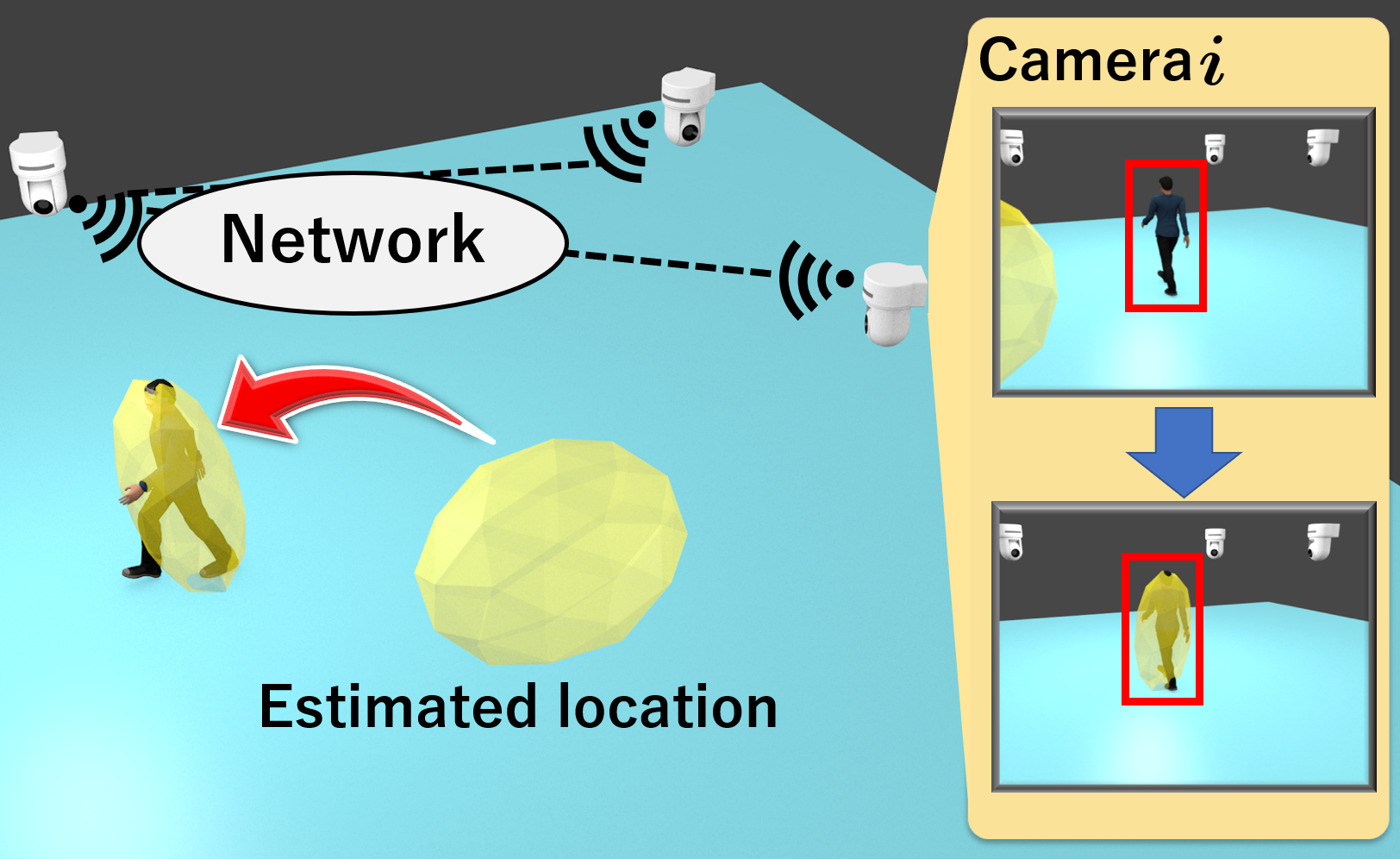
Coordination of Robots over Long Distance
How to achieve coordinated control of robots in distant areas (e.g. different continents)?
Approach: Passivity-based Control and Control Barrier Function
This is a collaborative work between the Robotarium in Georgia Tech and
the preliminary version of the Robot Zoo in Tokyo Tech.